こんにちは!
2023年は「テクノロジーを使って子どもたちと一緒に世界をちょっとだけ面白くする」ということに取り組んでいるVIVITAそしてVIVIWAREのプランナーさかいです。
6月4日、 秋葉原にあるモノづくりの一大拠点 DMM.make AKIBA にて「みんなの空想ラボ vol.0 Open day AKIBA Robot Challenge」の応用編「テクノロジーであそぼう!へんてこロボ道場」を開催しました。
当日の様子はこちらから!↓
「へんてこロボ道場」を開くにあたって、子どもたちに挑戦を煽るのであれば師範代も本気でへんてこロボを作らねばならぬ。というわけで、つくりました。へんてこロボ。
せっかくなので、子どもたちにも大好評だった(たぶん)師範代のへんてこロボをVIVIWAREの作例としてご紹介したいと思います!
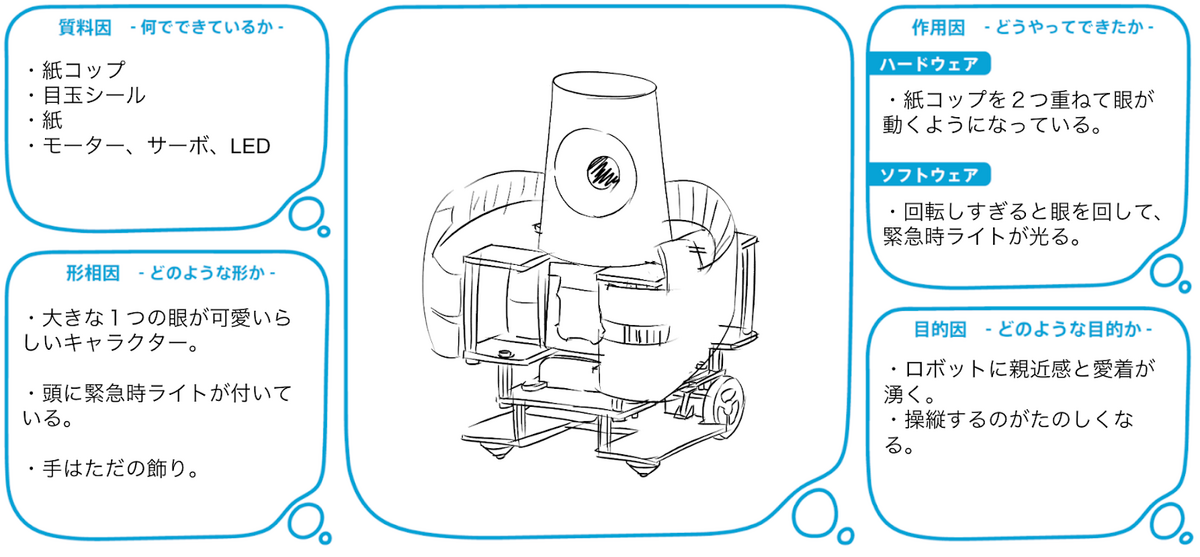
mix師範代「眼を回すロボット」
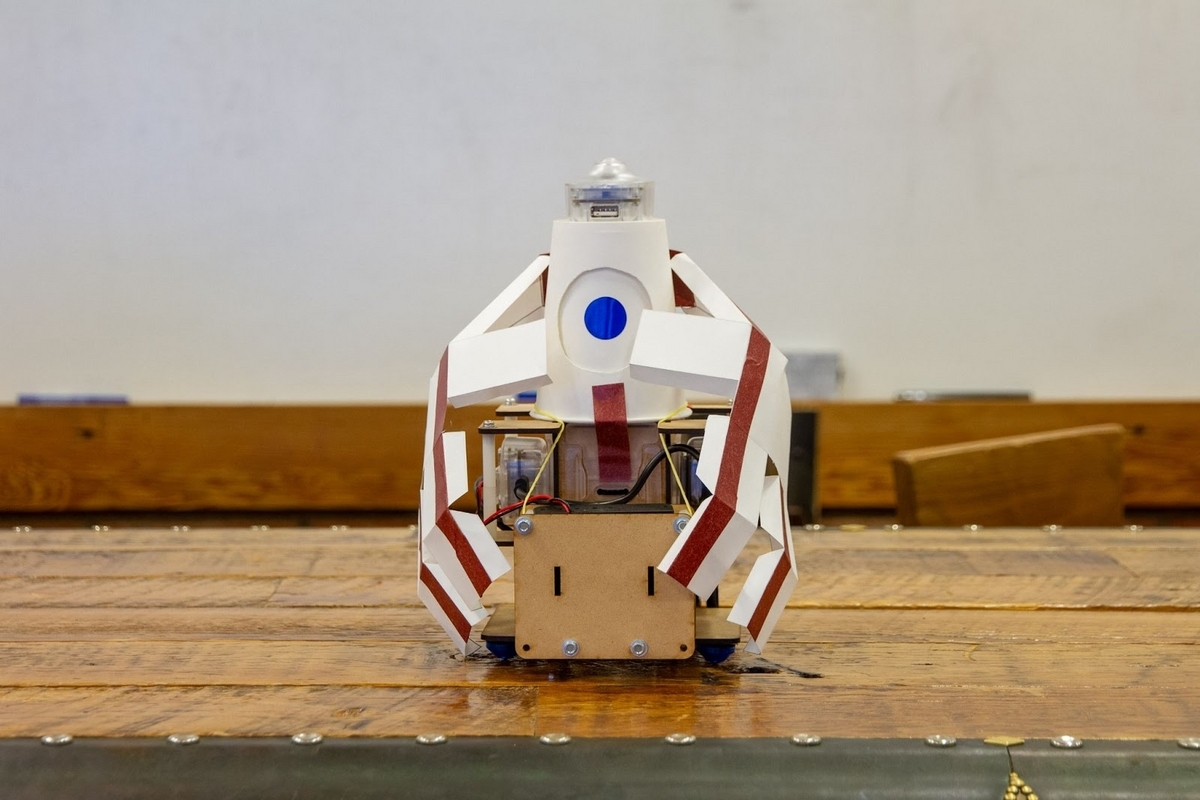
こちらは、はじめてロボットを操縦する人を笑わせるために誕生した「眼を回すロボット」です。ロボットなのにぐるぐる動かすと眼を回してヨロヨロします。回転しすぎて眼を回すと緊急時ライトが点灯し、操縦不能に陥ります。

眼を回している様子がかわいらしく、笑いを誘うと同時に親近感を覚えます。ダメな子ほどかわいいとはよく言ったものです。
「人間だれしもはじめては緊張するもの。その緊張を解いてロボットを好きになってほしい。」by mix師範代
mix師範代からのコメント
ロボットをキャラクターとして魅力的に見せる必要がありました。ですが、動きや機能を増やすと操作が複雑になってしまいます。苦手意識を与えてしまわないように、シンプルな操作で可愛さとヘンテコさをアピールできる方法はないか悩みました。
そこで注目したのが「眼」です。「目は口程に物を言う」というように、人は眼を特別なものと認識し、多くの情報を感じ取ります。眼の動きによるキャラクターの魅力を追求することにしました。
まず、ロボットがまるで生きているかのように見せる方法を考えました。
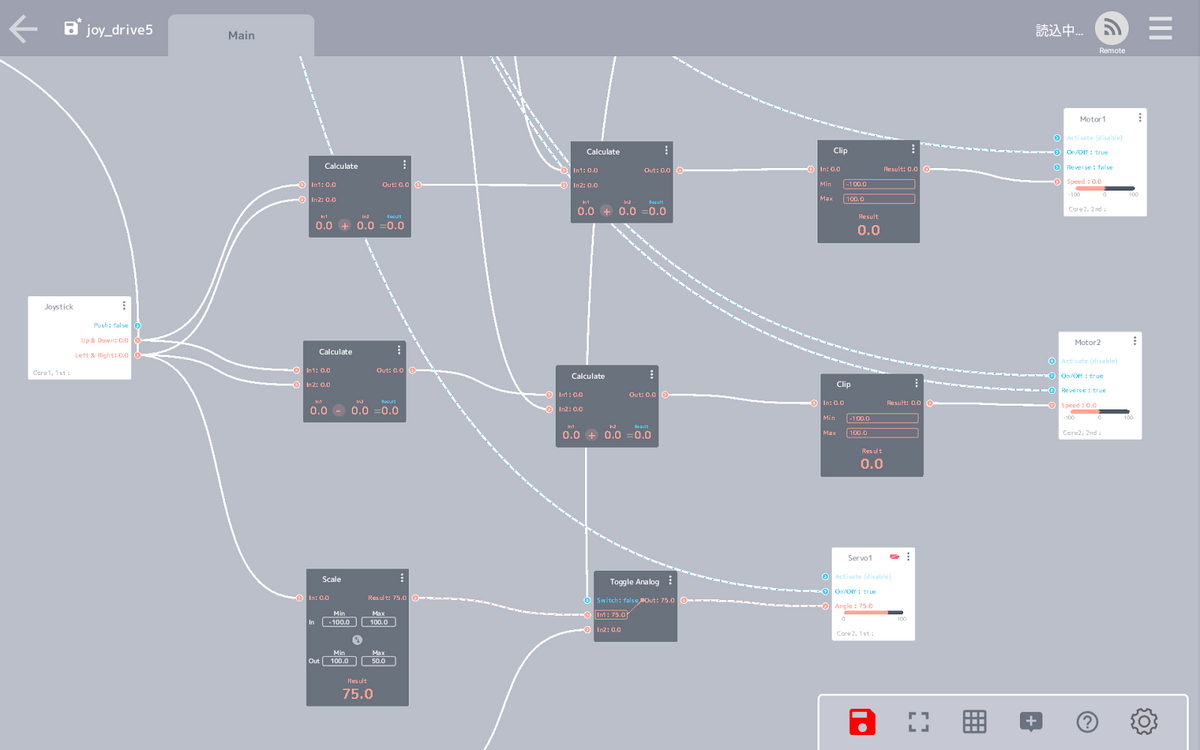
ジョイスティックの上下値と左右値の入力を計算して、ロボットは上:前進、下:後退、右:右回転、左:左回転をします。このとき、左右方向の値に連動して大きな眼が左右に動く仕組みを加えました。曲がる方向に目を向けることでロボットに意志があるように見せるのです。
すると不思議なもので、これだけでロボットが生きているように見えてきます。なんて可愛いのでしょう。
次にヘンテコな機能として眼を回すことを考えました。
本来、人間の弱点を補うために存在するはずのロボットに、あえて人間と同じ弱点を実装することに「ヘンテコ」さを見出しました。
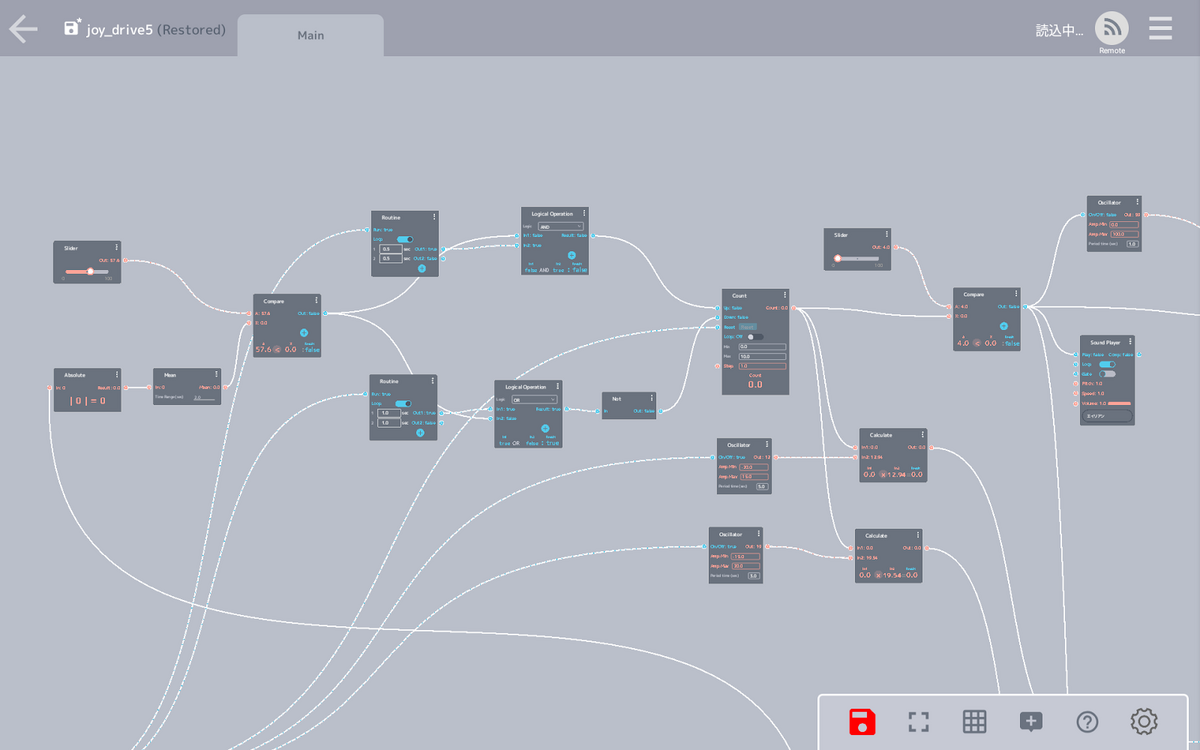
ロボットは一定時間以上回転すると、ジョイスティックの操作を無視して、縦横無尽に暴走します。このとき、眼は✕マークに切り替わり、警告音とともに頭のLEDランプが赤く点滅します。紙で出来た腕が大きく揺れ、フラフラしている様がとても可笑しくて可愛らしいです。
ですが、愛着が生まれたロボットは丁寧に扱いたいものです。暴走しないように操作することで、プレイヤーは自然と操作が上手になっていくでしょう。

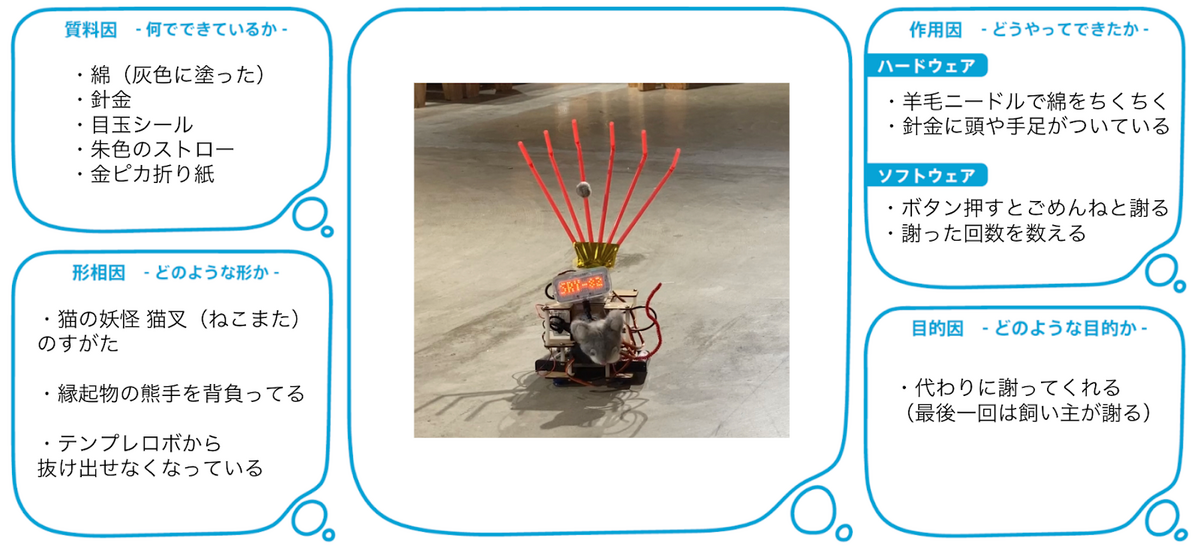
金井師範代「猫叉ロボ」

金井師範代の笑わせたい人は、怒らせてしまったときの奥さん。早く仲直りするために猫の手を借りることにしました。
人間はどんなに怒っていても86回謝られると許してしまうという論文があるらしく、85回は猫にかわいい声で謝ってもらい、最後の一回を自分で謝る仕様です。しかも背負っている熊手に奥さんが好きなものを配置し、チラつかせる作戦です。
しかし実はこの猫、長く生きすぎてしまった「猫叉」。尻尾が2本あり、ロボットに閉じ込められています。闇が深い。
金井師範代からのコメント
「ヘンテコ代理謝罪」という大舞台を成功させるため、考えられる様々な要素を盛り込みました。
構想初期は猫の頭だけだったのですが、気がついたら手足が4本しっかりついていて肉球まで完全再現されていました。蛇足ならぬ猫足ですね。かわいいから許す。

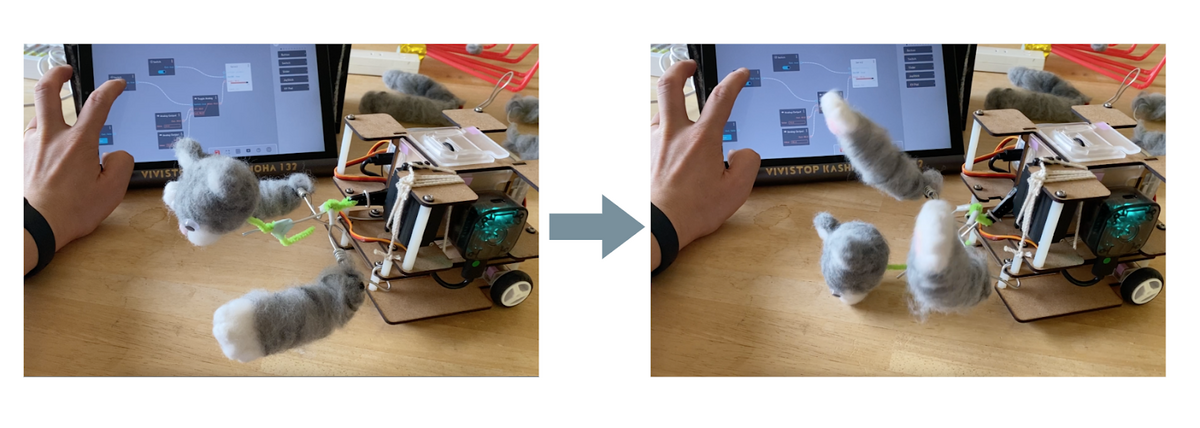
土下座のモーションは、サーボモーターの先端に針金とモールを曲げて作った「クランク機構」をつけることで、猫の頭を下げる時に両腕が上がるようにしました。これによって全身全霊の土下座を実現しています。
手作りのクランク機構の設計誤差のためかサーボモーターには結構負荷がかかるので、機体への固定には両面テープではなく凧糸を使っています。凧糸でしっかりと縛り付けることでサーボモーターがグラグラと揺れても外れることがありません。余った凧糸はロボットに封じ込められた化け猫を演出するために全部本体に巻き付けました。
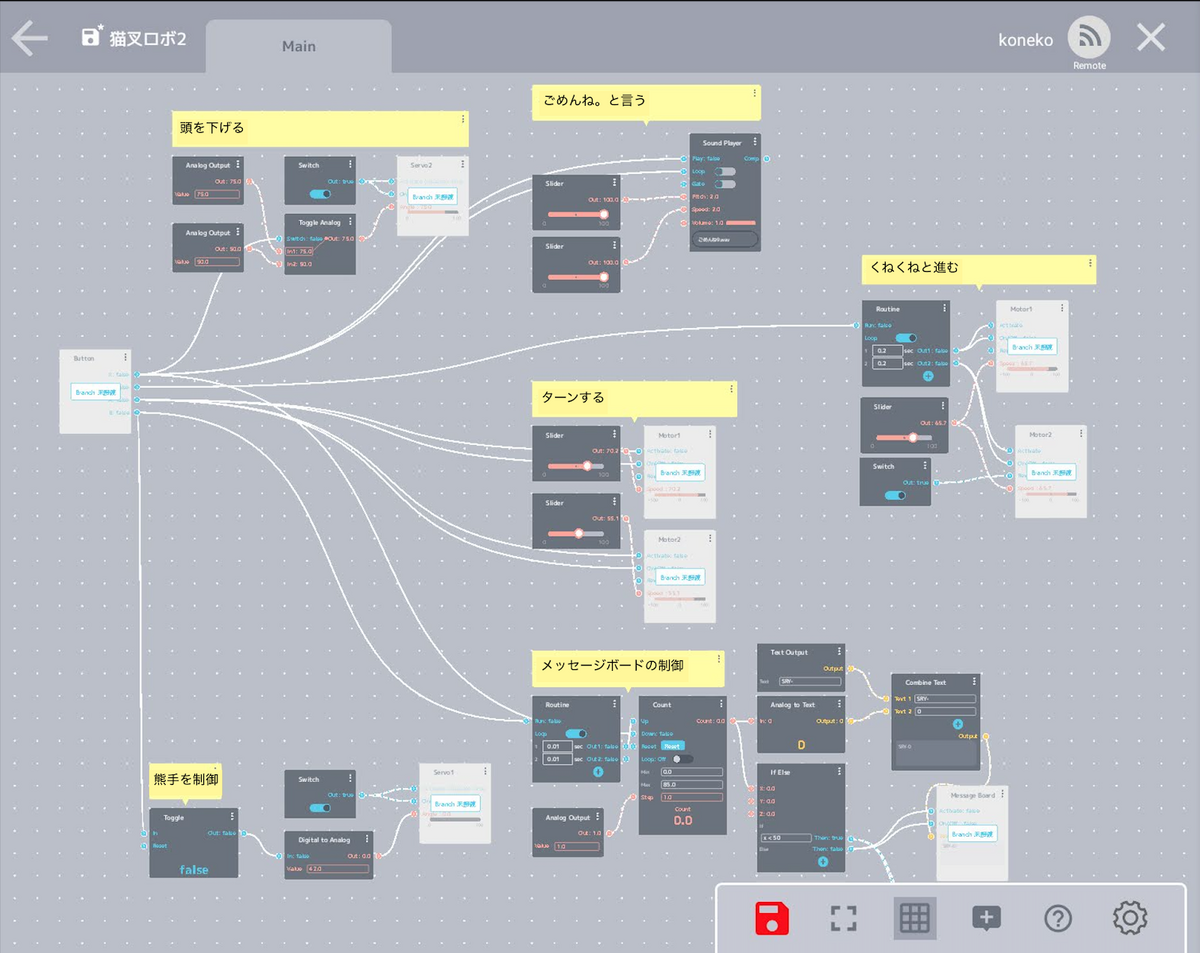
プログラムはこんな感じです。
操作は「Buttonセル」のX/Y/A/Bの四つのボタンだけで全ての操作が成り立つように工夫しています。マスターである僕は片手でポチポチとボタン操作をしながら、横でしおらしく立っているだけで良いのです。
Y:くねくねと前進する
A:右回りにターンする
B:熊手を挙げる・下げる+ごめんねカウンターをリセットする
X:頭を下げる+ごめんねと言う+ごめんねと言った数をカウントする
これらの操作を組み合わせることで
「入場→熊手を上げて謝罪の準備→ひたすら謝る→ターンする→退場」
という一連の流れを軽やかにおこなうことに成功しました。
ロボットの移動は「Routineモジュール」を使って、左右のタイヤが0.2秒ごとに交互に動くようにしました。こうすることでクネクネゴニョゴニョとバツの悪さを演出しながら前進をさせることができます。
もちろんこれらの一連の動きは自動化することもできます。しかし謝罪行為で大切なのは相手の顔色を伺いながら言葉のタイミングやリズムを調整することです。そのようなニュアンスの調整こそが謝罪行為の本質であり、人間に残されたかけがえのない役割なのです。
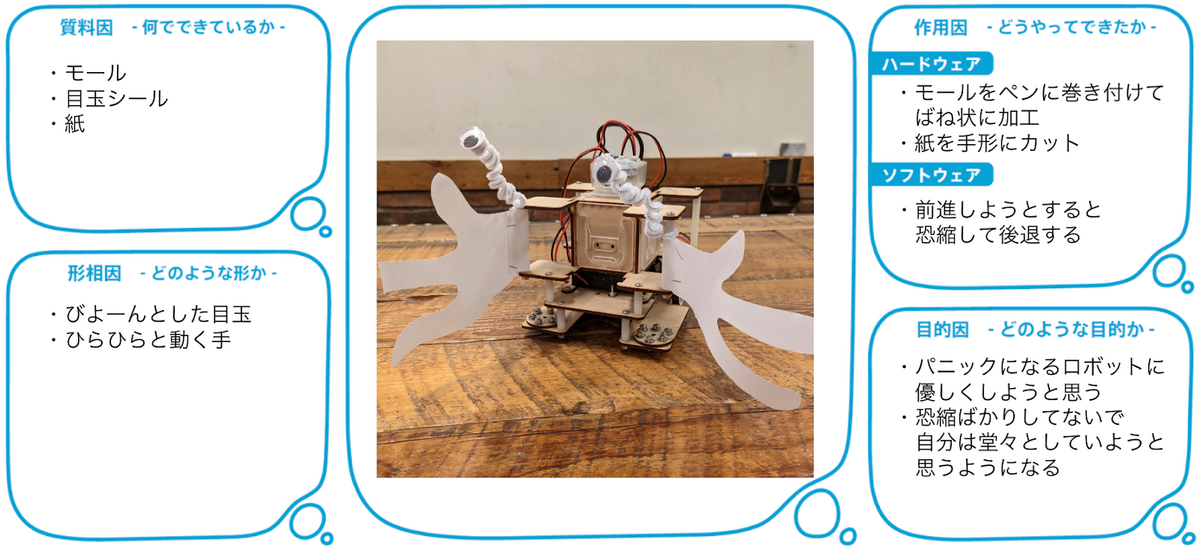
今井師範代「恐縮ロボ」
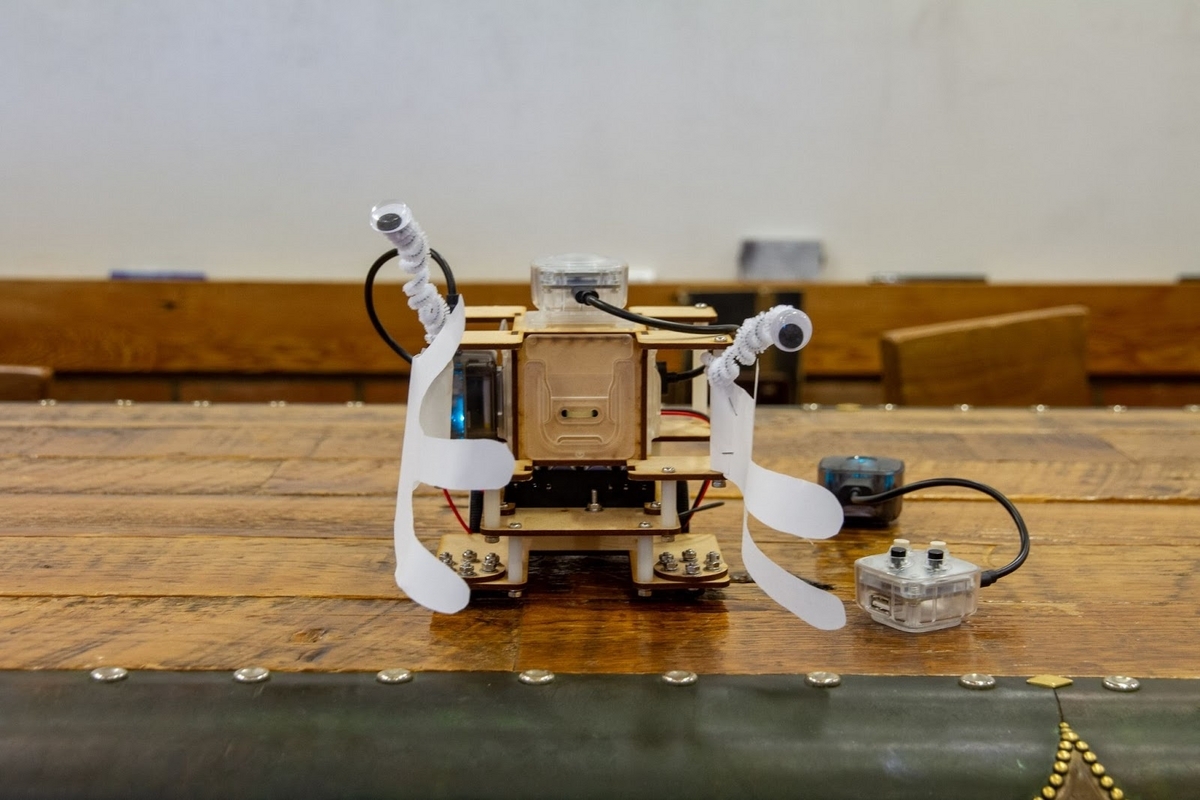
ただひたすら恐縮するだけのこのロボット、「エンジニアだからとすごいロボットをつくってくるのではないかと期待している人」を笑わせるためにつくったそうです。
ロボットが前進しようとしても遠慮して後退し、軽いパニックに陥った後に停止します。いやいや、私なんて・・・と謙遜する動きがとてもかわいらしく、笑いを誘います。

「他人が設定した高いハードルなんて越えずにくぐればいい」by 今井師範代
今井師範代からのコメント
操作する側の前に出そうとする意思に反して後退させるのが基本の動きで、それをきっかけにロボットが自分の動きにびっくりして最終的にはパニックになり制御不能になるのをイメージして制作しました。
自分の加速度を検知してまた逆方向に動き、その加速度を検知してまた逆方向に動き...というのを加速度が基準値を下回るまではひたすらくり返すようにプログラムをすることでイメージしていた動きを再現しています。
ヘンテコロボを作るとなったときに、まず初めはロボット自体をいじるのではなくコントローラをヘンテコにすることで、こちらの意に反したヘンテコな動きをするロボットにしようと考えていました。
しかしながら、Motion CellやMeasure Cellを使っていざコントローラを作ってみると、操作する本人にはヘンテコ感が感じられるものの見ている側にはそれが伝わらなさそうだったので方向転換をして今回の形に落ち着きました。今回の恐縮ロボに当初想定してたコントローラを組み合わせればもっとヘンテコなロボが完成するかもしれません。
一方そのころ
そして私はと言えば、金井師範代の「猫叉ロボ」の筐体(?)づくりを受け持ち、ダイソーで買ったフェルティングニードルと手芸綿をひたすらチクチクしてました。フェルティング自体が全く初めて&何の見本もなく適当に作った割に我ながら器用です。

羊毛フェルト用 ニードルホルダーjp.daisonet.com



ちなみにポスカで着色しました。綿の状態で好きな色のポスカを適当に塗り、全体がまんべんなく色づくようにほぐします。猫感がでるよう、濃淡は少しまだらにしました。動物ロボを作ってみたい人におすすめ。
そしてチクチク刺しているあいだ無心になれるので、気分転換や精神統一したい人にもおすすめです。マインドフルネス。あまりに楽しかったので自宅用にフェルティングニードルを買いました。次は羊でもつくってみようかと思いましたが、なぜか餃子のイメージが湧いてくるので餃子の妖怪でもつくってみます。
最後に、金井師範代が「ちがう…!」と言いながら組み立てている様子をどうぞ。
